产品中心
推荐产品










AGV
发布时间:2016-01-20 10:12 作者:shsinaen 次数:次
详细介绍
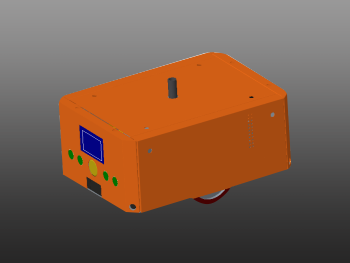
自动无人引导小车是一个融小车机械技术、人机工程、机电一体化、数字信号处理、数据融合、实时数字信号处理、轨迹规划、多智能体协调、以及无线通讯等理论和技术于一体的设备。
当前主流导航技术有磁性、视觉、激光等种类。其中磁性导航因其低成本、高可靠性、线路弹性大等因素,应用面最为广阔。

调度软件功能说明
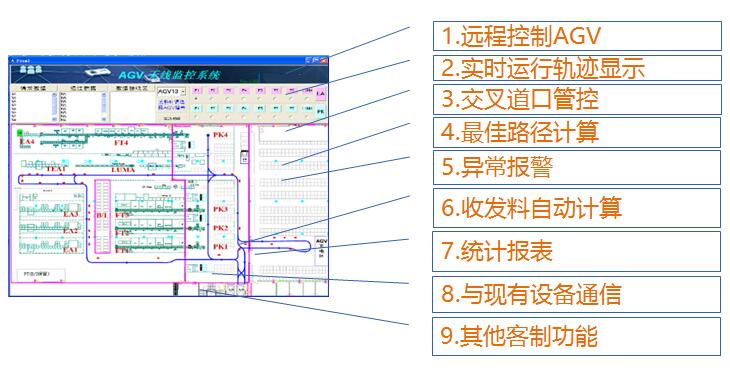
当前主流导航技术有磁性、视觉、激光等种类。其中磁性导航因其低成本、高可靠性、线路弹性大等因素,应用面最为广阔。
通用主要参数
| 项目 | 参数及功能 | 说明 |
| 双向行驶 | 有 | |
| 行驶速度 | 0~47 m/M | 双MCU控制,行驶与辅助功能分开,确保行驶平稳及通信可靠 |
| 载荷 | 0~1200kg | 该指标为拉载 |
| 路径选择 | 支持多种复杂路径选择 | 单机可以设定规定路径,也可通过调度系统进行更任意路径设定 |
| 低电量提醒 | 有 | 有专门电压检测模块 |
| 空车提示 | 有 | 有助于自动计算机器人使用效率,结合调度系统能及时发现异常状况 |
| 触摸屏(HMI) | 有 | 可实现人机交互,储存信息量大,显示信息丰富 |
| 自动充电 | 有 | 可自动行驶到自动充电区域,由人工更换电池 |
| 雷达 | 有 | 提升行车安全,避免前方障碍(选配) |
| 布线 | 较合理 | 内部空间布局更合理 |
| 电池接入方式 | 自动 | 安全,方便 |
| 尺寸 | 1300*600*1600 mm | 最外侧尺寸 |
| 定位方式 | RFID | RFID弹性大 Proximity Sensor用于精确定位 |
| 运行定位精度 | +/- 1 mm | 业界一般+/- 20mm |
| 电池容量 | 100Ah | 自动充电(选配) |
| 地面坡度 | +/- 35mm | 对地面平整度要求低,业界一般在正负20mm以内 |
| 障碍感应 | 3m 1200 区域 | 最大探测距离可达3m,响应时间小于80ms |
| 通讯 | Wifi | 确保AGV与送料中心、AGV与AGV之间及时通讯 |
| 导引方式 | 磁感应 | 可靠性高,轨道易于变更,可重复使用 |
| 最小转弯半径 | 0.6m |
调度软件功能说明
 QQ客服
QQ客服